ГлавнаяИсследованияPhysical AI: Powering the New Age of Industrial Operations
Всемирный экономический форумPhysical AI: Powering the New Age of Industrial Operations
Специалисты Всемирного экономического форума (ВЭФ) при участии аналитиков Boston Consulting Group подготовили белую книгу, посвященную тому, как прогресс в области промышленной робототехники меняет саму природу автоматизации и открывает возможности для устойчивого роста. В ней рассматриваются достижения в аппаратном обеспечении, искусственном интеллекте и технологиях машинного зрения, которые формируют так называемый физический ИИ — роботов, способных воспринимать, рассуждать и действовать автономно.
Белая книга опирается на реальные примеры внедрения таких решений в компаниях Amazon и Foxconn, а также на анализ текущих технологических и организационных тенденций в отрасли.
Ключевые выводы:
- технологические прорывы переосмысливают возможности роботов, считают специалисты ВЭФ. Современные роботы могут выполнять сложные задачи в динамичных условиях благодаря недавним инновациям в программном и аппаратном обеспечении. Достижения в области ИИ и сложного моделирования, ставшие возможными благодаря ускоренным вычислениям с использованием процессоров (GPU), позволяют запускать модели в реальном времени. Это фактически выводит роботов на уровень физического интеллекта — они учатся воспринимать, планировать и действовать в реальном мире;
- как отмечается в материале, развитие камер высокой четкости, лидаров и тактильных сенсоров в сочетании с алгоритмами компьютерного зрения позволило машинам распознавать объекты и их 3D-ориентацию в реальном времени. Роботы теперь могут не только видеть предмет, но и оценивать его свойства, что дает им более полное понимание того, как с ним взаимодействовать;
- инновации в области искусственного интеллекта и ПО позволили роботам принимать разумные решения в режиме реального времени, пишут авторы документа. Благодаря методам обучения с подкреплением и высокоточным физическим симуляторам роботы учатся методом проб и ошибок в виртуальных средах. Модели, способные обрабатывать визуальную информацию, текст и данные о действиях, обеспечивают практически интуитивное взаимодействие человека и робота и превосходное контекстное понимание;
- мягкие захваты и высокоточные двигатели дают роботам возможность надежно брать нестандартные и хрупкие предметы. Это дополняется ПО на основе искусственного интеллекта, которое регулирует захват и силу в режиме реального времени. В материале подчеркивается, что длительное время работы батарей и новые формы — от четвероногих до гуманоидных роботов — расширяют спектр применения устройств и позволяют им автономно действовать в разных условиях;
- инновации привели к тому, что роботы переходят от жесткого программирования к обучению и контекстному поведению. В материале говорится, что сегодня сосуществуют три типа устройств: Rule-Based (жестко запрограммированные), Training-Based (обучающиеся через симуляции) и Context-Based (основанные на контексте и выполняющие задачи без явного обучения). Вместе они создают многоуровневую экосистему автоматизации, где каждый тип решает разные по сложности и изменчивости операции;
- как отмечается в документе, обучение и самообучение роботов снижает трудозатраты инженеров до 70% и ускоряет внедрение новых решений примерно на 50%. Это делает автоматизацию выгодной даже для небольших серий и неповторяющихся операций — например, при сборке гибких комплектов или в адаптивной логистике;
- новое направление контекстно-ориентированной робототехники использует обучение с нуля (Zero-Shot Learning) и фундаментальные модели для автономного восприятия, рассуждения и действий в незнакомых ситуациях;
- специалисты ВЭФ отмечают, что данные для робототехники остаются ограниченными и дорогостоящими, поскольку их приходится собирать в реальном мире. Однако эта проблема решается с помощью генерации синтетических данных, фотореалистичных симуляций и технологий телеприсутствия, которые позволяют операторам взаимодействовать с роботами и удаленными объектами в реальном времени;
- авторы документа полагают, что сейчас формируется новый технологический стек Physical AI Stack. Он охватывает пять уровней — от аппаратных компонентов и вычислений на периферии (Edge Hardware) до систем симуляции, операционных платформ и пользовательских интерфейсов. Цель состоит в том, чтобы обеспечить совместимость, стандартизацию и масштабируемость решений в промышленной робототехнике;
- как подчеркивается в документе, ни одна компания не может развивать все направления в сфере робототехники одновременно, поэтому кооперация с университетами, стартапами и промышленными интеграторами становится необходимой. Совместная разработка снижает риски, упрощает интеграцию и позволяет создавать решения, которые невозможно было бы создать в одиночку.
 MarkTechPost
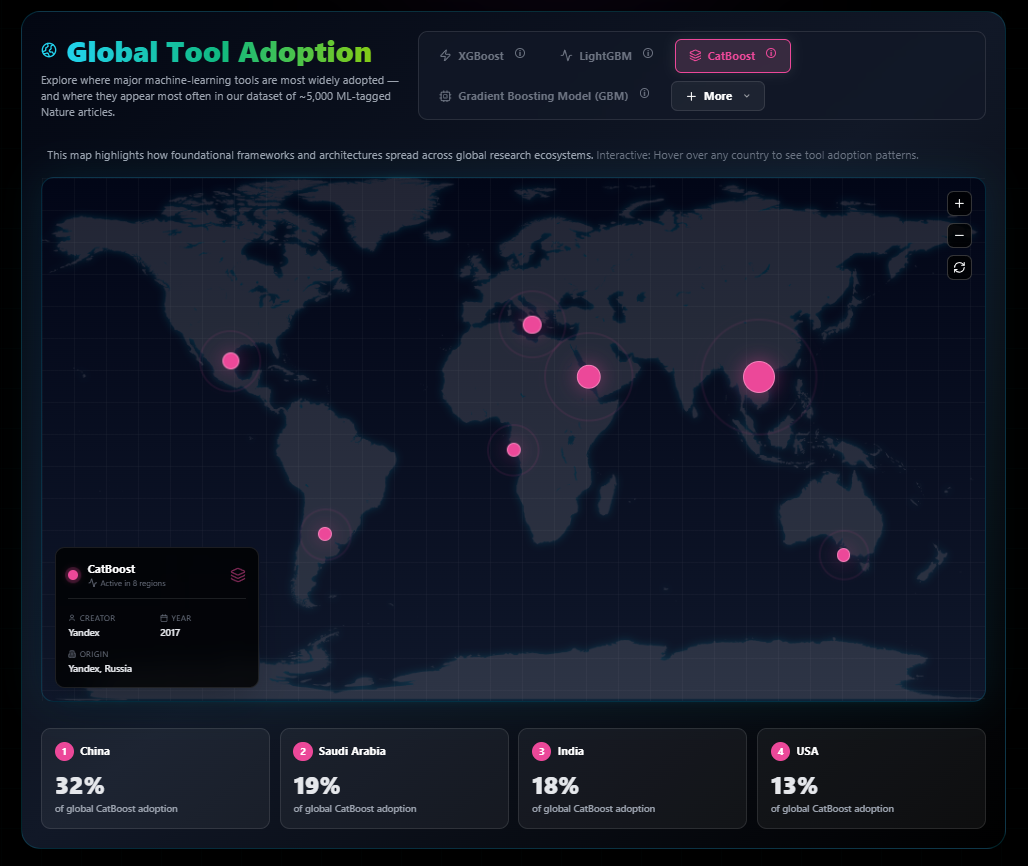
MarkTechPostML Global Impact Report 2025
Алгоритм «Яндекса» CatBoost стал одним из наиболее часто упоминаемых ML-инструментов в научных статьях.Подробнее
 Capgemini
CapgeminiTurbocharging Software with Gen AI
В 2026 году до 85% разработчиков ПО могут начать использовать генеративный ИИ.Подробнее PwC
PwC2026 AI Business Predictions
Аналитики прогнозируют в 2026 году увеличение значимости ИИ-агентов в бизнесе, развитие систем оркестрации.Подробнее Технологии Доверия
Технологии ДоверияОценка ИИ российским бизнесом
В России 86% компаний внедряют ИИ-инструменты.Подробнее
Нажимая на кнопку, вы соглашаетесь с политикой конфиденциальности
ICT.Moscow — открытая площадка о цифровых технологиях в Москве. Мы создаем наиболее полную картину развития рынка технологий в городе и за его пределами, помогаем бизнесу следить за главными трендами, не упускать возможности и находить новых партнеров.